【電気電子工学科(スマートシステム学科から令和6年4月名称変更)】クローラー式水中ドローン開発の裏側を公開します
福山大学では、大学ブランド研究プロジェクトとして、「瀬戸内の里山・里海学」を推進しています。工学部スマートシステム学科では、これまで海底カメラの開発に携わってきました。今回、沖准教授から、ROV(クローラー式水中ドローン)の開発の報告が届いていますので、当学科のブログメンバーの伍賀が紹介します。なお、スマートシステム学科は、学科設置の基本理念に立ち返り,令和6年4月より、「電気電子工学科」に名称変更します。(詳しくは大学HP及び、学科HPをご覧ください。)
スマートシステム学科の沖です。福山大学ではブランド研究プロジェクトとして、「瀬戸内の里山・里海学」という統一テーマの下、学部や学科で協働する複数の研究課題を実施しています。そして、この研究プロジェクトを通じて里山・里海に根ざす未来のまちの在り方を提示する「瀬戸内モデル」の構築に全学を挙げて取り組み、これを福山大学のブランドとして確立することを目指しています。スマートシステム学科では、メインテーマの一つ「里山・里海の自然の把握」の中のサブテーマ「里海の藻場環境観測システム」を主導しています。藻場には小動物や稚魚が成育していて、瀬戸内海の豊かさを支えています。そこで、稚魚や藻場の生物の生活の様子や藻場そのものの様子を観察するためのシステムの開発を行っています。

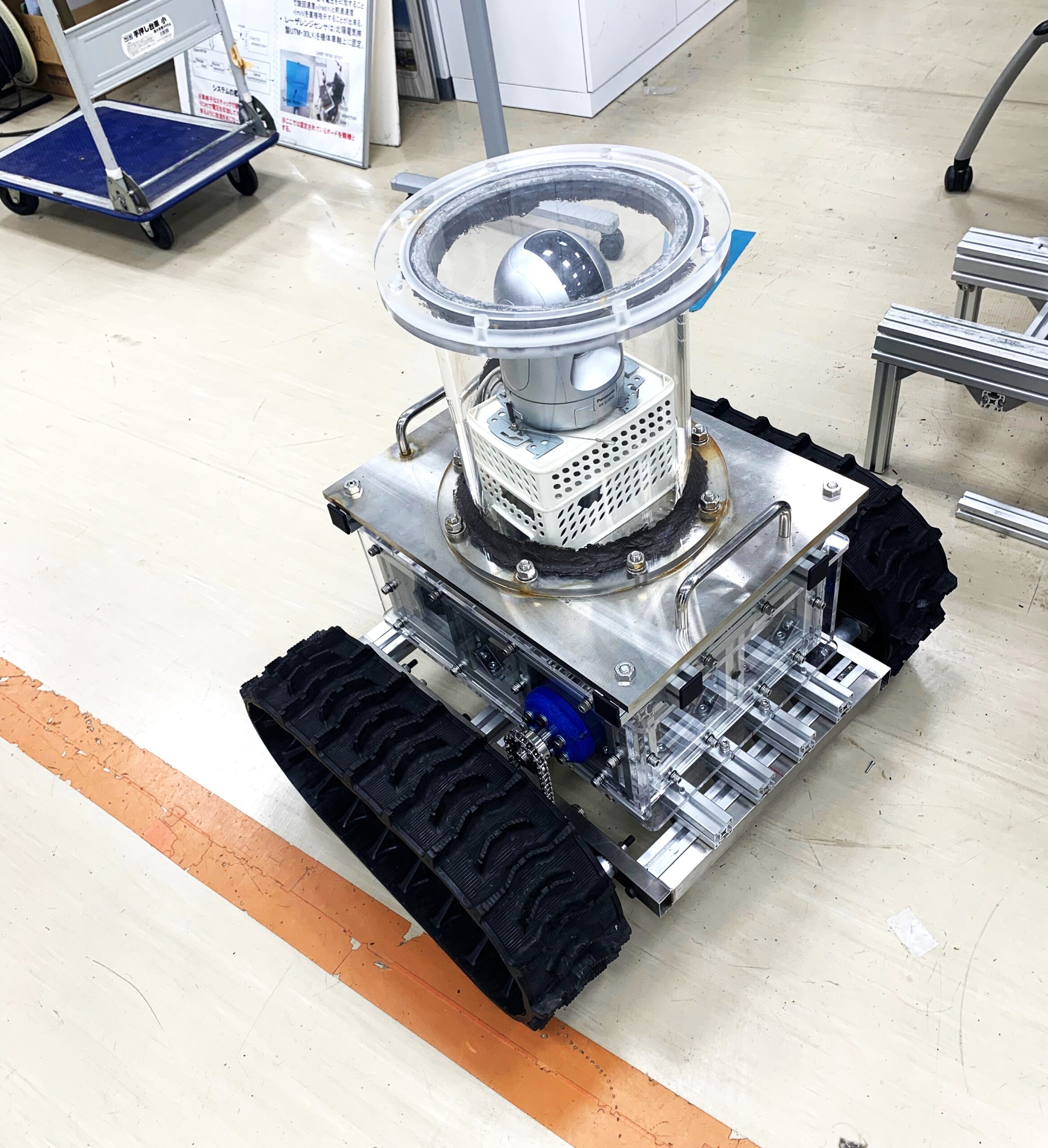
このシステムに求められる機能は「動画や画像を撮影しながら水中を移動すること」です。この機能を実現するものとして、最近ではスクリューで移動する通称「水中ドローン」が市販されています。ところが市販の水中ドローンではカメラのズーム性能が不十分である、スクリューの音や水流により繊細な生物に近づきにくい、長時間の撮影が困難などの問題があります。これらの問題を解決するために、沖研究室(スマートマシン研究室)では、クローラ(キャタピラ)で海底を移動して、必要な時には水中浮遊でき、かつ、高機能カメラを搭載したドローンを提案し、開発しています。水中で活動する有線操縦のドローンはROV(Remotely operated vehicle)とも呼ばれます。開発中のクローラもROVの一種です。
開発中のROVの3D-CAD図を示します。上部の円筒部にカメラが搭載されます。
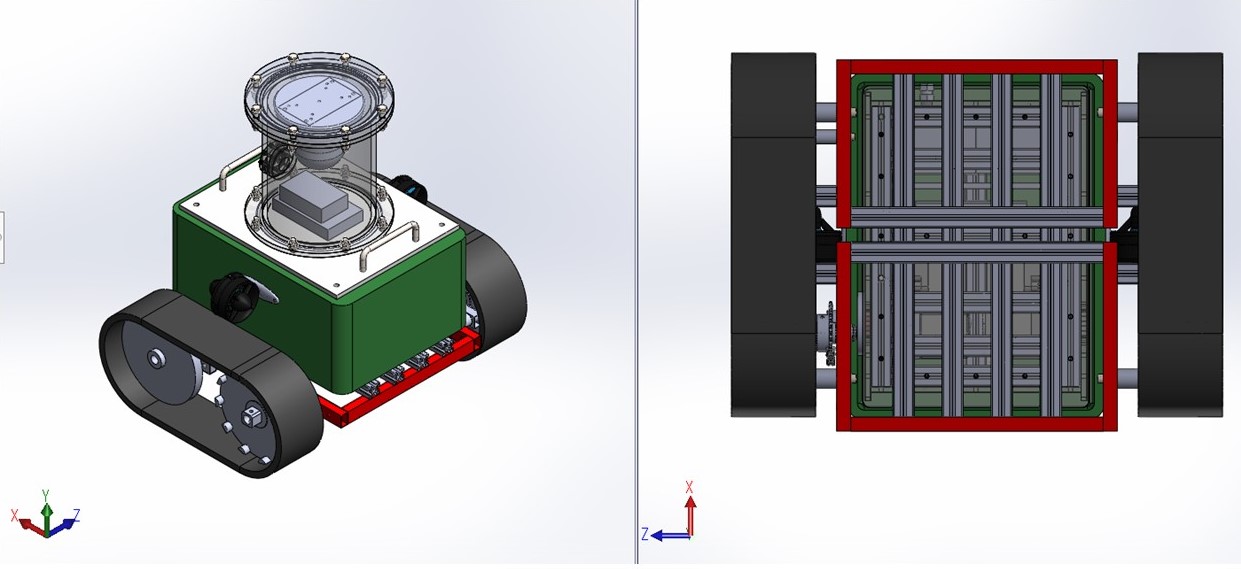
開発中のROV(Remotely operated vehicle)のCAD画面における俯瞰図(左)および底面の見取り図(右)
この図の中で、赤く着色した部分は、クローラの基本骨格(シャシ:chassis)になる大事な部分です。この部分だけを取り出すと、下の図のようになります。大きな穴は車軸を通します。それ故に、穴の位置のずれや角度のずれや全体のひずみが僅かでもあると、操縦性が悪くなる、摩擦で音が出る、エネルギー損失が大きくなるなど走行性能を著しく損ないますから、極めて高い加工精度が要求されることになります。
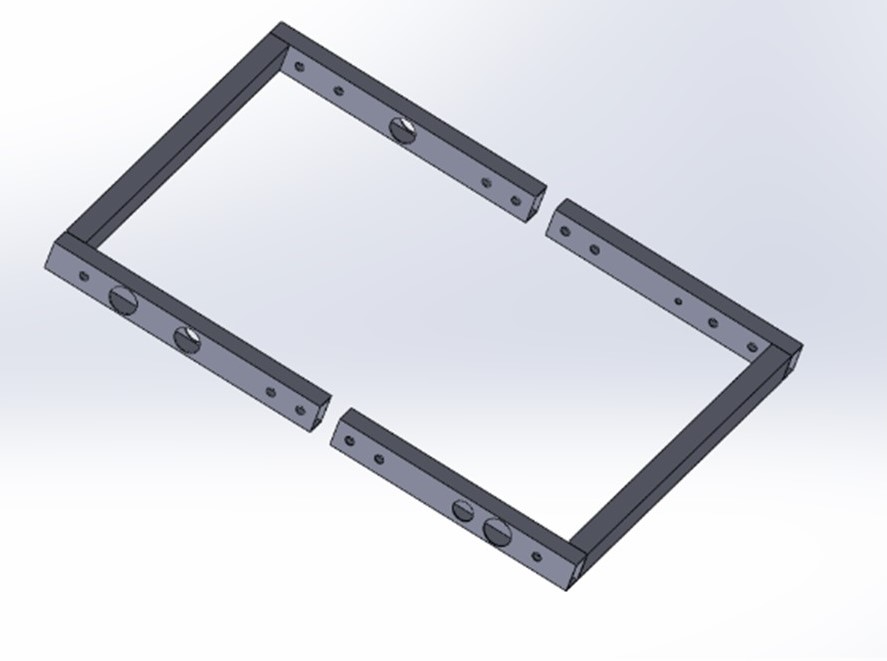 しかも、軽量化と剛性(強度)を両立しようとすると、薄肉のステンレスの角パイプを正確に長方形に溶接することが必要で(熱収縮も考慮に入れる必要があります。)、要求の位置に綺麗な孔を穿つ必要があります(ステンレスはとても固いです)。これらの加工は、それぞれが高度で、また全て完璧に揃えることは極めてハ ードルが高く、自作は困難であることが分かりました。
しかも、軽量化と剛性(強度)を両立しようとすると、薄肉のステンレスの角パイプを正確に長方形に溶接することが必要で(熱収縮も考慮に入れる必要があります。)、要求の位置に綺麗な孔を穿つ必要があります(ステンレスはとても固いです)。これらの加工は、それぞれが高度で、また全て完璧に揃えることは極めてハ ードルが高く、自作は困難であることが分かりました。
万事休すかと思ったのですが、「備後圏域のプロフェッショナルな加工技術を、福山大学の“やってみたい”に活かして、学生達に地域の本格的なものづくりを伝えたい」という理念の下にゆるりと集い、月に1度ものづくりの活性化のために意見交換をしている工学部主催のコミュニティ(通称:ムーンショット研究会)に相談したところ、メンバーの金属加工企業であるプレコ技研工業株式会社( http://www.pleco.co.jp/ )の小林憲輔社長が二つ返事で加工を引き受けてくださいました。
どうなるかと思っていると、あっという間に「できました」のお返事。納期が短くて驚愕し、出来上がった部品を見て感嘆してしまいました。作成していただいたパーツを、繰り付けたところが次の写真です。左に溶接部が見えます。すごく華麗です。歪が全くない高精度の仕上がりで、触り心地も最高です。プロフェッショナルの技を肌で感じることができました。

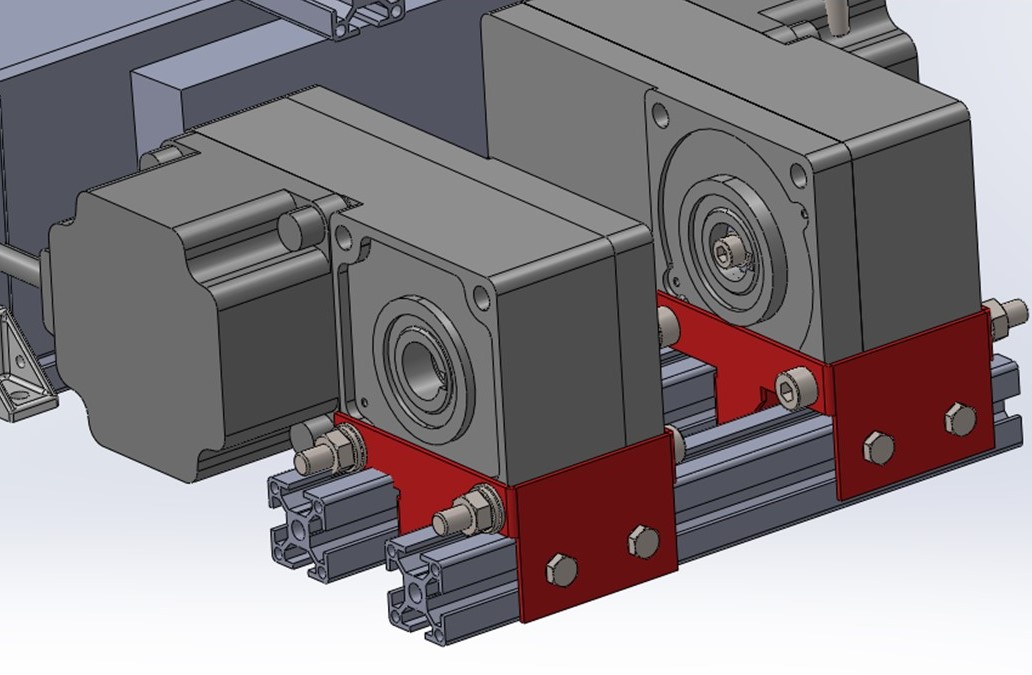
さらに、後日、モータを固定する部品も作成していただきました。下図の赤い部分がその部品です。これは、モータとアルミフレームを繋ぐパーツで、この部分も軽量化と剛性の両方を満たす必要があり、更に駆動部分なので、先のシャシと同様で高い工作精度が要求されます。今度は、切り出しと曲げの精度が要求されます。この部品は「曲げ」があるので、アルミニウムで一度自作していたのですが、強度不足でした。
モータを固定するパーツの設計。CADによる概観図。
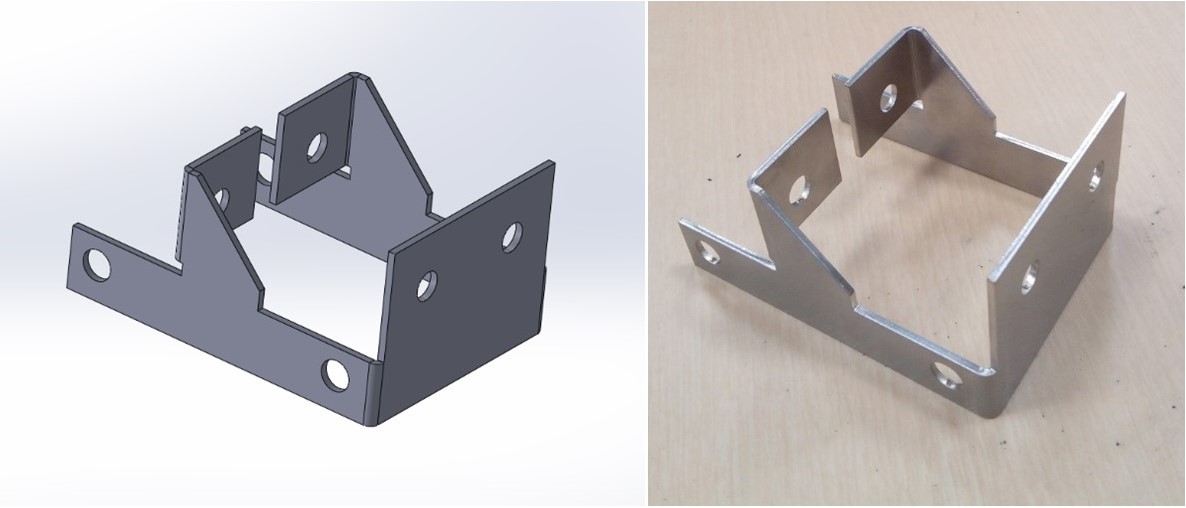
この部品だけを取り出した図が次の写真の左で、出来上がったパーツが右です。材料はステンレス( SUS304 )です。この部品も、短納期、高精度でした。当然ですが、自作のものとは比べものにならないです。
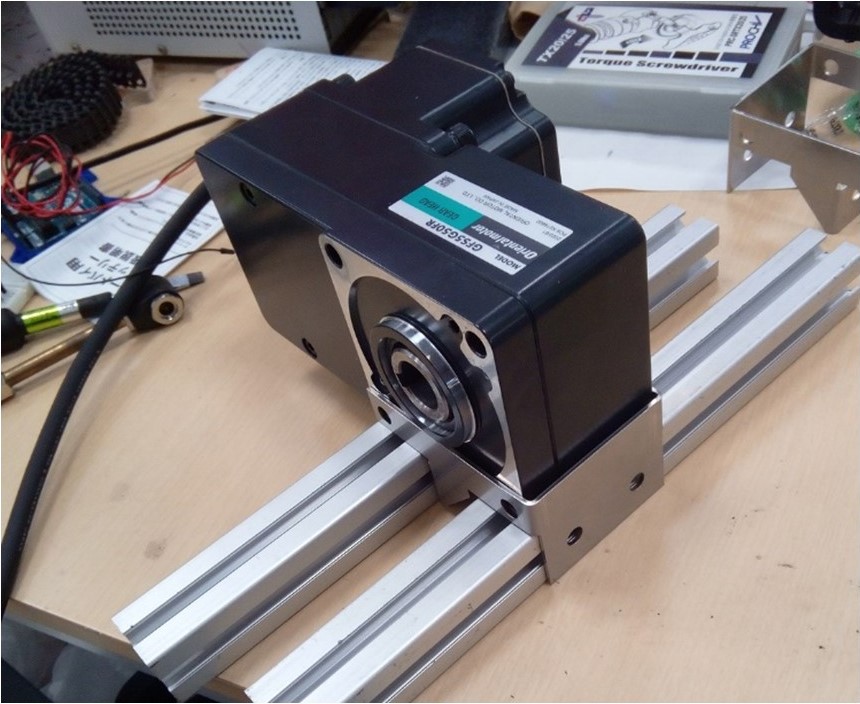
これを取り付けた図が次です。設計図通りに、ピタッと据え付け場所に収まり、全てのねじ穴が寸分の狂いもなく揃っています。工作を経験した方は、これがどれほど大変なことかお分かりになると思います。故に、こんな部品を手にすると快感の極みです。プレコ技研工業株式会社様、ありがとうございました。
これで、開発は一気に加速しました。ROVが完成した暁に、どのくらいの性能を発揮するか、今から楽しみで仕方ありません。実は、他にもパーツをお願いしています。それは、また今度報告します。
地域の製造業の方々との協働は、日本、備後地域のものづくりの凄まじさ実感することができ、無限の可能性を感じさせくれます。
学長から一言:工学部の研究には目的に叶った機材や備品が必要で、市販の既製品がなければ、自ら作ることなるのでしょうが、今回は地元の金属加工専門の企業の助けを得て、望みどおりのパーツが手に入ったという嬉しいニュース。これで水中ドローンを使った研究が一気に加速するはず。ご協力いただいたプレコ技研工業株式会社の小林憲輔社長様に私からも感謝を申し上げます。