



機械システム工学科
木村 純壮(きむら じゅんそう)

| 職 名 | 教授 |
|---|---|
| 学 位 | 博士(工学) |
| 専門分野 | 制御工学 メカトロニクス |
| 担当科目 | システム制御入門,制御システム設計,メカトロニクス,工業数学Ⅰ・Ⅱ など |
| メッセージ | 制御工学は,多種多様な機械を,コンピュータにより自動で,安全に,すばやく,正確に,思い通りにあやつることを目標にしています.日常生活で使用している機器の中にも,たくさん利用されており,人々の生活や産業を支えています.さらに研究が進めば,もっと便利になるでしょう。 |
むだ時間システムの状態予測制御と状態予測器に関する研究
制御の指令に対して反応遅れがあると,思い通りに制御できません.この反応遅れをむだ時間と呼びます.むだ時間が存在する制御対象に対しては,むだ時間先の未来状態を予測して,この予測値によりフィードバック制御を行うことができ,これを状態予測制御といいます.状態予測制御の基礎理論や予測に使用する状態予測器の構成法,また,状態予測制御の応用について研究しています。
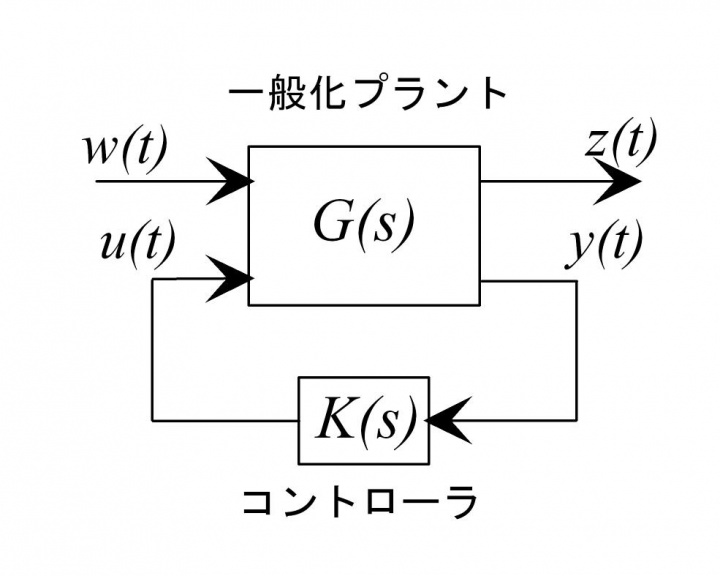
制御システム
振幅抑制型のロバスト有限時間整定制御の研究
良好な制御を行うために,制御入力が過大になることがあります.しかしながら,過大な制御入力は,好ましいものではありません.必要最小限の制御入力で,良好な制御特性を達成することが理想的です.そこで,一定の時間で制御量が目標値に一致する有限時間整定制御において,必要とする制御入力の最大振幅を最小に抑える最適化制御を実現しました.これを利用すれば,省エネルギー制御にも役立つことが期待されます。

サーボシステム
ヒューマノイドロボットの運動制御
近年,特に発展を遂げているヒューマノイドロボットの運動制御について研究しています.脳からの指令により体を動かしている人間の生体システムを見本に,それを模倣(マネ)して,ヒューマノイドロボットをコンピュータで歩行制御する研究を行っています.歩行の際に活性化する脳(セントラルパターンジェネレータ)の役割を,コンピュータの中の神経振動子ネットワークモデルが果たしています.知的に動く機械を創り出すたびに,人々の生活はより便利になってきています。
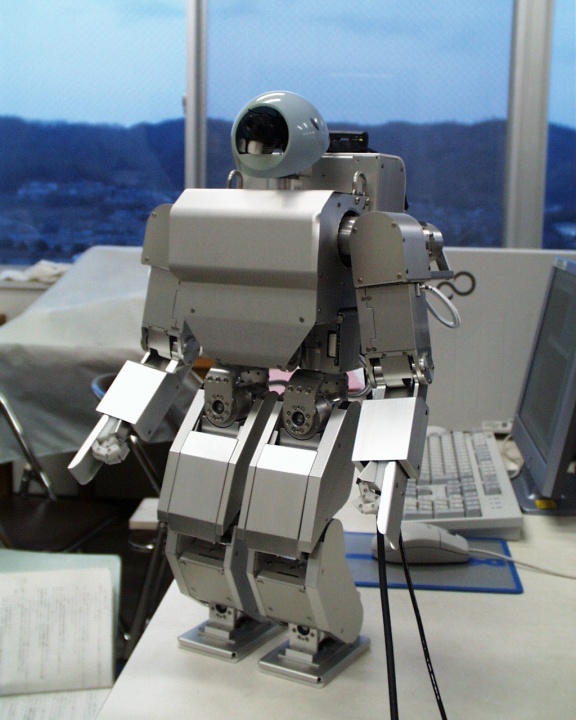
ヒューマノイドロボット
生体運動システムの計測・モデリングとロボット運動制御
人間はしなやかで精緻な動作をすることができます.これに対して,機械の多くは機能的な動作しかすることができません.そこで,ロボットなどの機械に,人間のようなしなやかな動作をマネ・模倣させる制御方法を研究しています.この研究では,人間の筋肉で発生する電位,筋電位を計測して使用しており,筋電義手などの開発に応用することが期待されます。
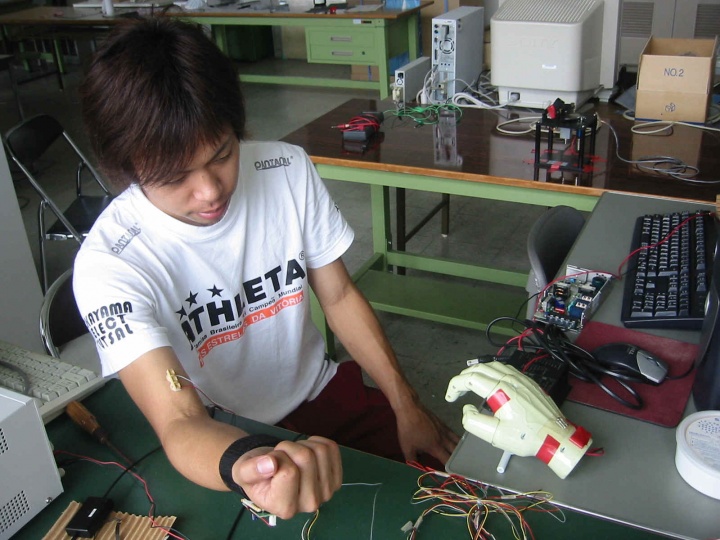
生体運動システムのモデリング
