



【スマートシステム学科】高大連携授業で自律移動ロボット作成!
昨年に続き、今年も広島県立福山工業高校との高大連携授業が8月6日(月)~9日(木)の日程で行われました。今年は、一般社団法人教育ネットワーク中国の高大連携事業により広島県内の高校生も迎えて、工学部において様々な授業を提供しました。工学部スマートシステム学科(フェイスブックはこちら)の伍賀が紹介します。
スマートシステム学科では、昨年の講義内容を踏まえ、私の担当で「つくろう自律移動ロボット~ Braigtenberg Vehicle~」というタイトルの講義を高校生の皆さんに体験してもらいました。
「ブライテンベルグビークル」とは、自律移動(自分で判断して行動する)ロボットの最も単純なタイプであり、「模型は心を持ちうるか」などの著者としても知られる脳神経科学者のヴァレンティノ・ブライテンベルグ氏によって提案されたクルマのモデルです。この単純な自律移動ロボットであるブライテンベルグビークルを実際に作ってみて勉強しよう、というのが授業の狙いです。
今年は福山工業高校の生徒さんと広島県内の高校生の皆さんに参加していただき、かなりの大所帯になりましたが、大学院生や福山工業高校OBの学生が講義の手伝いをしてくれて助かりました。3人のグループを8班つくり、講義と実習を交えた形式で進めていきます。

工学部棟1Fのプロジェクトルームで開催しました。
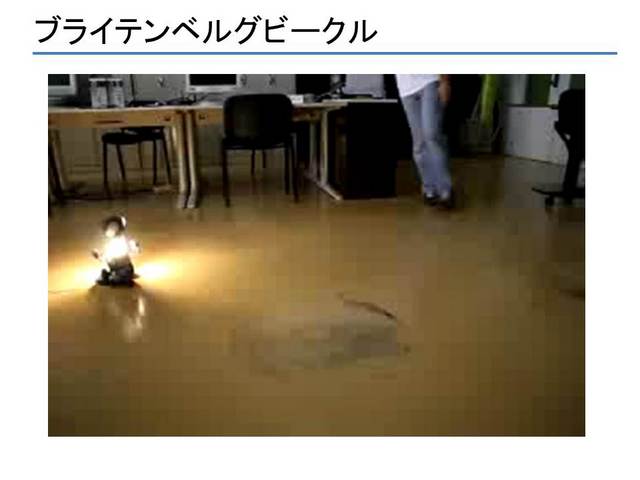
講義資料より。ブライテンベルクビークルは単純に光に反応して動くロボットです。
さて、今年の講義では、実際の生物の光に反応する性質である「走光性」というものにも少し触れ、また日本画として有名な速水御船の『炎舞』を取り上げ、昆虫が光に反応する『飛んで火に入る夏の虫』という話もしてみました。また、下の講義資料には、シュモクバエという熱帯に住む眼の形態に特徴があるハエを載せています。
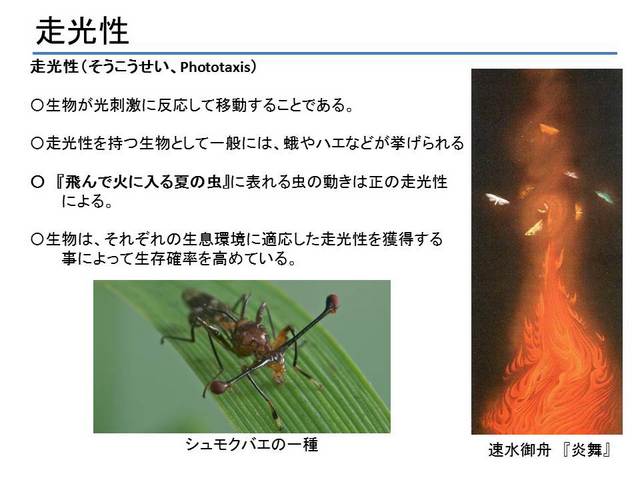 講義資料より。走光性について
講義資料より。走光性について
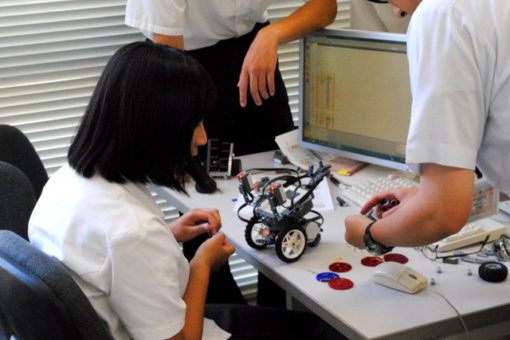
今回のブライテンベルグビーグル型ロボットも2つの光センサと左右のタイヤを持っていて、各光センサの検出する値の強度によって、タイヤの回転量が変化するというものです。午前中の講義の後半からレゴNXTを使って、実際にブライテンベルグビーグル型のロボットを組み立ててもらいました。

各班でレゴを使って光センサを搭載したオリジナルの移動ロボットを組み立てていきます。
こちらはオレンジ色のセンサが上向きについて光を探知しやすいように調整しています。
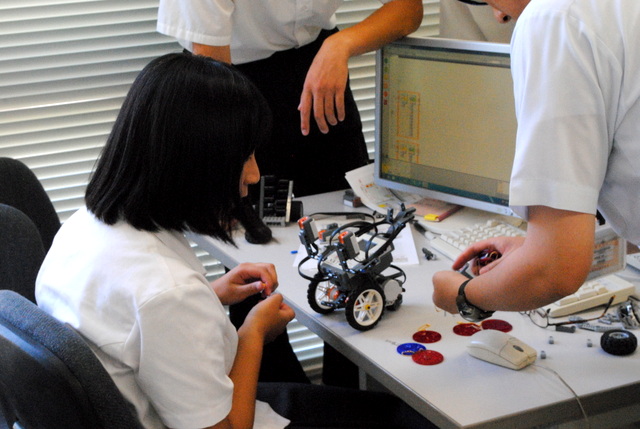
昼食を挟んで、午後からロボットのセンサとモータをプログラムで調整し、光に反応した動作を行うことができるようにしていきました。下の写真のように、ビジュアルプログラミングで初心者でも簡単にプログラムが書けるようにしました。
ビジュアルプログラミング環境でお手軽にプログラム
出来上がった自律移動ロボットは、懐中電灯を使って本当に光に反応して走行するかどうかを確かめます。

懐中電灯をセンサに当てて、前進・後進どちらの動きなのかを確認し、反応が弱い、強い、タイヤの回転が前方向、後方向なども確認し、プログラムやロボットの組立て直しに反映させていきます。

講義の最後は、各班対抗の自律移動ロボットのレースを行いました。各班で工夫をしてスピードが速く操作しやすいロボットを考え、調整して作ってくれ、なかなか盛り上がったのではないかと思います。

今回の講義では、光に反応する生物の特徴やロボットのソフトウェアとハードウェアの関係と生物ではそれらの改良や調整がどのようになっているのか・・・?などの生物よりのトピックスや人工知能の重要性などを講義に盛り込んでみました。高校生の皆さんには少しでも内容を伝えることができていれば幸いです。ともかく、講義は大変盛り上がり、皆さん満足してもらったようなので一安心です。
最後は皆さんで記念撮影です。
学長から一言:最後の集合写真の生徒さんたちの表情のよいこと!!!授業は大成功だったようですね!女子学生の数がちょっと少ないけれど、でもやはり充実感あふれるよい表情!皆さん、福山大学にまた来てねッ!!!
この記事をシェアする

{kind=link}