




【スマートシステム学科】里海里山プロジェクト・藻場生態観察用水中ドローン発進!
このブログで、シリーズでお伝えしている福山大学ブランディング推進のための研究プロジェクトとして展開中の瀬戸内の里山・里海学、スマートシステム学科では藻場観測のための海底カメラの開発が進行中です。今回は、藻場観測のためのかなり大型の水中ドローンの完成の知らせが仲嶋学科長、沖准教授より届いています。工学部スマートシステム学科(フェイスブックはこちら)の伍賀が紹介します。
--------------------------------------------
福山大学ブランディング推進のための研究プロジェクトとして展開中の瀬戸内の里山・里海学で、スマートシステム学科は藻場観測のための水中ドローンも開発しています。この水中ドローンの水槽試運転に成功しました!
水槽試験中の水中ドローン
動画はこちらです。このときのドローンから見た様子は下の写真のようになります。設計製作者の沖准教授、撮影者の仲嶋学科長がばっちり写っています。

ドローン操作中の沖准教授、撮影中の仲嶋学科長
動画はこちらで見ることができます。浸水もなく、基本動作もOKでした。次は海中テストです!以下、もう少し詳しくこの水中ドローンについて説明しますね。水中ドローンとはROV(Remotely operated vehicle)とも呼ばれる遠隔操作型の無人潜水機です。この海中ドローンは、藻場で生育する稚魚やプランクトンなどの生態を観察できることを目指しています。イメージはこんな感じですね。
ROV運用イメージ
これまでにもスマートシステム学科では海中ドローンを使った水中観察にトライしてきました。
【スマートシステム学科】里山・里海プロジェクト 水中ドローン発進 (2019/3/5 本ブログ記事)
この小型機もよかったのですが、操作が難しいという問題がありました。そこでスマートシステム学科では、沖准教授の研究室が中心となって、オリジナルの水中ドローンを開発しています。この水中ドローンは、生物を観察するためにスクリューに頼らずに水中でバランスをとることができる構造になっています。静か~に生き物の生活を観察できるのです。この水中ドローンを紹介します。
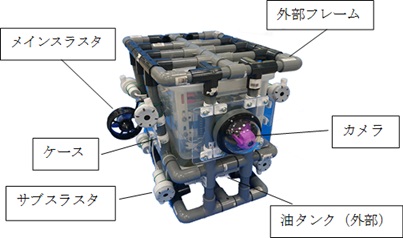
ROV 概略図!
前後左右の移動はメインスラスタ(スクリュー)で行います。上下の移動は、サブスラスタと油タンクで行います。油タンクは、魚でいう浮袋の働きをします。油をケース内に移動させるとドローンは沈み、外部に移動させると浮き上がります。カメラは観察用ですね。上下にカメラを向けることもできます。電子回路はケース内に収まっていて、これを囲む外部フレームにカメラやスクリューなどを取り付けています。
ケースの中にはこんなのが入っています。全部で4層になっています。
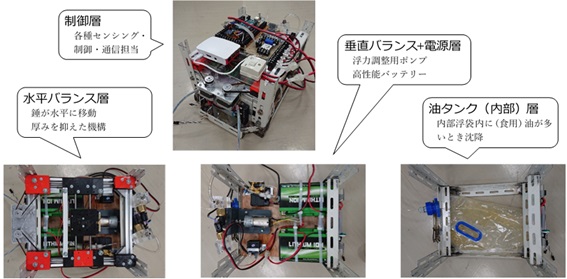
ROV の構成と機構
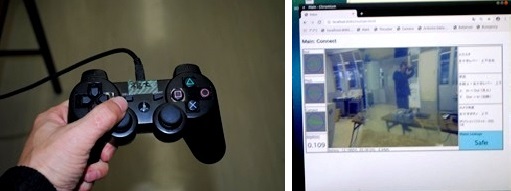
上から制御層で、水深の計測やモータの制御などを行います。2層目は水平バランスそうです。ここには前後左右に動く錘があり、水中ドローン本体の傾きを制御します。3層目は垂直バランス・電源層です。先ほどの油タンクの油を移動させるポンプとバッテリーがあります。4層目はケース内の油タンクです。 コントローラはこれですね。モニターに映るドローンからの映像を頼りに操縦します。
さて、実験の様子です。クレーンで釣り上げて実験用に投入!!

今回は浸水テストと各部の動作テストでした。ちょっとキビキビと動きすぎなので、これから、操縦が簡単になるよう補助制御系を組みます。その次はいよいよ海でテストです。
--------------------------------------------
この水中ドローン(ROV)の動画は以下のリンクでみることができますので、ご覧ください。
スマートシステム学科FaceBookはこちら
スマートシステム学科Twitterはこちら
学長から一言:いよいよ実用に耐える水中ドローンが登場しそうになってきましたねッ!!!姿形も威風堂々、なかなかのものではありませんか!!!海でのテストの結果を楽しみにしています!!!瀬戸内海の魚や藻たちの間で、評判になるかも・?・?・?
この記事をシェアする
