



電気電子工学科
伍賀 正典(ごか まさのり)

| 職 名 | 准教授 |
|---|---|
| 学 位 | 博士(工学) |
| 専門分野 | 機械工学 |
| 担当科目 | ロボット制御、ロボット応用、競技ロボット実習Ⅱ、ものづくり加工実習、暮らしとものづくりなど |
| メッセージ | 近年のコンピュータや電子機器の発達でロボットは身近な存在になりつつあります。ロボットと動物、私たち人間はどこに違いがあるのでしょうか。本当にいきているかのようなロボットを製作することはできるのでしょうか。私の研究では、身体性という考え方をもとに、より優秀なロボットの知能をどのようにつくるかということを探っていきたいと考えています。 |
協調して行動するロボットチーム
アリやハチのように、一つ一つの力は弱くても、集団になって大きな仕事をするようなロボットをロボティックスワーム(群ロボット)と呼びます。チームの一員としてまわりのロボットと協力しながら行動するには、状況に合うように役割分担を変えていくことが必要です。あらかじめ定められたプログラムに従うだけではなく、変化する状況に柔軟に対応するような人工知能を備えていることが求められます。そのためのロボットの頭脳として、人工神経回路(アーティフィシャルニューラルネットワーク)、調整アルゴリズムとして、進化計算に着目して、シミュレーションや実機でロボットを製作しています。
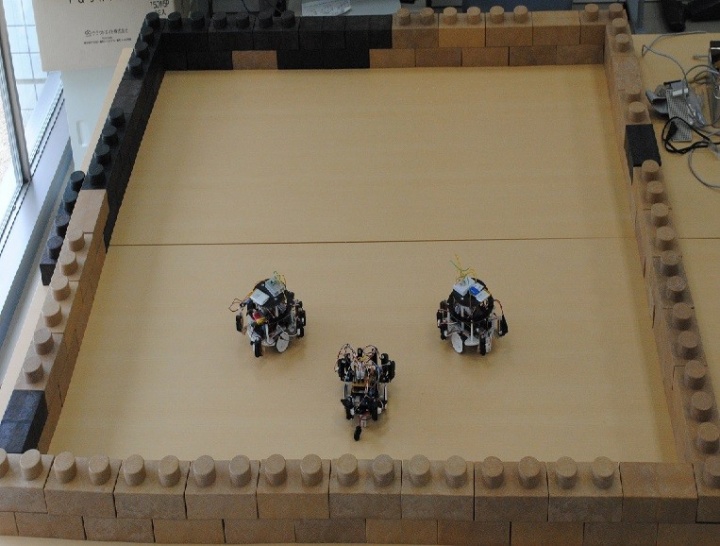
物理シミュレータをもとにした実機実験
すべてはセンサーモータシステムである!
外部からの情報をうけとり、それにもとづいて考え、外部に働きかける。これが全ての生物やロボットやプログラムの基本動作であるという考え方がエージェントベースアプローチです。そのため、外部の情報をいかに詳しく受け取ることができるかということはとても重要です。触感の情報を詳しく得るため、触覚センサを提案して開発をしてきました。また、広範囲の映像を一つのカメラで得るため、全方位カメラの小型化と画像処理の研究を進めています。これらの装置をロボットやシステムに搭載することで、より賢い機械ができる可能性が広がります。
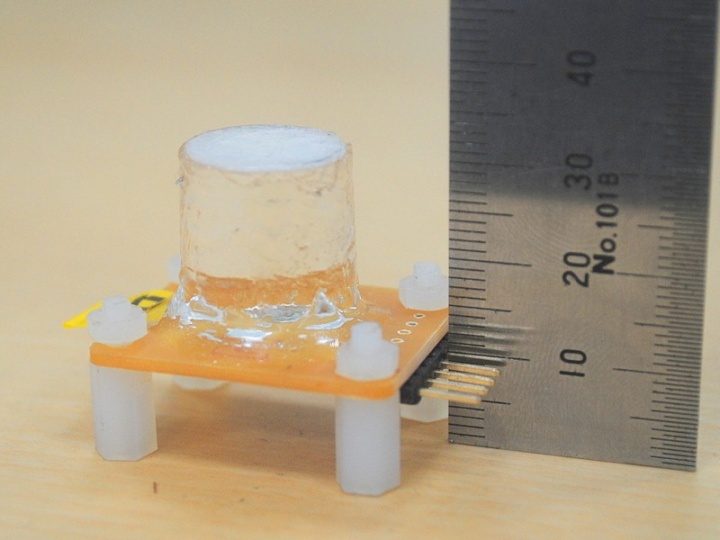
提案している光学式触覚センサです。
レスキューロボットはどうつくる!?
近年、ロボットによるレスキュー活動が期待されていますが、残念ながら実際の災害現場で活躍するロボットは非常に少ないのが現状です。災害現場で活躍するためにロボットに必要な機能はいったいなんでしょうか? それを探るための足掛かりとして、「レスキューロボットコンテスト」や「レスコンシーズジャンボリー」というレスキューを題材としたロボットコンテストが開催されています。このコンテストに参加することで、通信機能、マイコンでの制御、センサの統合といった基本的機能の向上、技術の確立を目指しています。
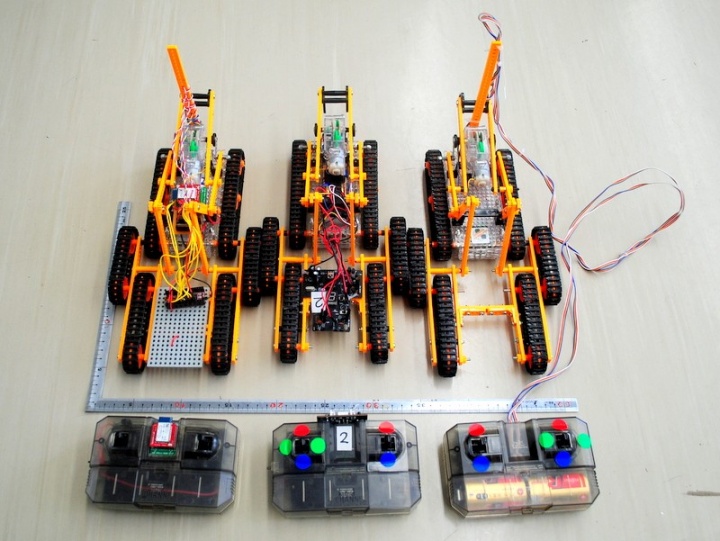
レスキュークローラそろい踏み
